
近期,工程学院硕士研究生李斯培以第一作者身份在在国际知名期刊Computers and Electronics in Agriculture(中科院一区Top期刊,影响因子8.9)发表题为“In-situ 3D reconstruction and analysis of droplet motion characteristics in downwash flow of multi-rotor UAV”的研究论文。该研究创新性地提出了一种基于双无人机协同作业的雾滴动态监测框架,为解决复杂农田环境下植保无人机喷雾飘移精准表征的科学难题提供了新方案。
在植保无人机作业过程中,旋翼下洗流场与液滴的交互作用机理极其复杂,如何实现田间环境下液滴运动轨迹的精准监测一直是制约精准施药技术发展的瓶颈。传统的计算流体动力学模拟在多变环境中精度受限,而水敏纸测试仅能获得静态沉积结果,粒子图像测速技术则难以克服野外光照干扰及测量范围有限的局限。
针对上述挑战,工程学院硕士研究生李斯培在文晟教授和王娟教授的指导下,自主研发了一套双无人机协同感知与作业系统。该系统集成激光雷达主动感知技术,通过一架无人机真实还原作业流场,另一架无人机作为感知平台获取高频、高密度的三维点云数据。
研究团队进一步提出了基于深度学习语义分割与体素化局部光流估计的三维动态分析框架。通过构建深度学习模型,系统能从复杂的背景噪声中精准提取微小液滴的点云特征;结合改进的光流算法,实现了对下洗流场中液滴群从宏观时空分布到微观运动特征的全过程、高维度深度解析。
研究结果表明,该系统在非结构化果园环境中展现出较强的抗干扰能力,并成功揭示了无人机旋翼下洗流场对液滴群的卷吸与输送机制。相较于传统测量手段,该方案不仅大幅提升了监测维度,且具备更低的成本与更强的野外适应性。研究成果为优化无人机抗飘移喷施策略、构建植保作业数字孪生模型以及实现精准变量施药提供了关键的科学支撑与数据基础。
图1 论文刊登
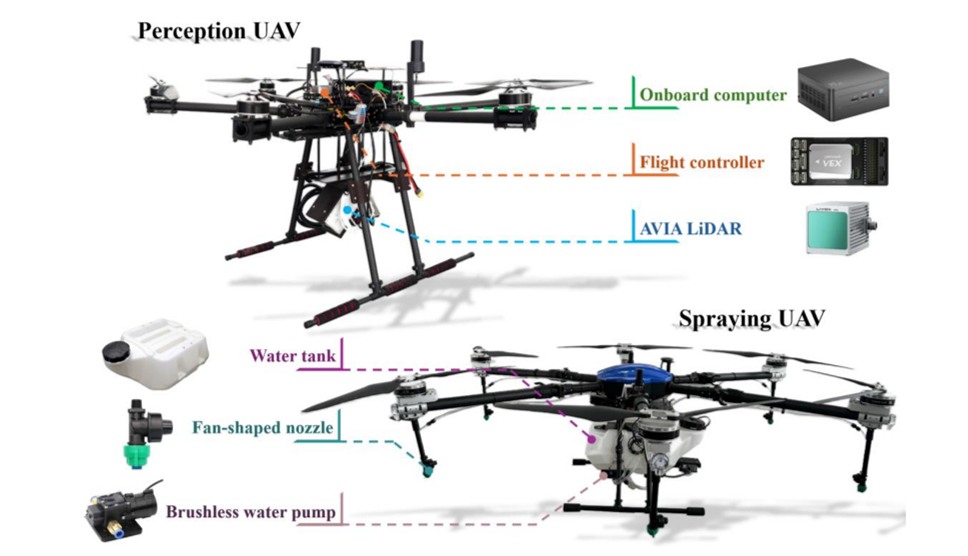
图2 双无人机协同感知平台
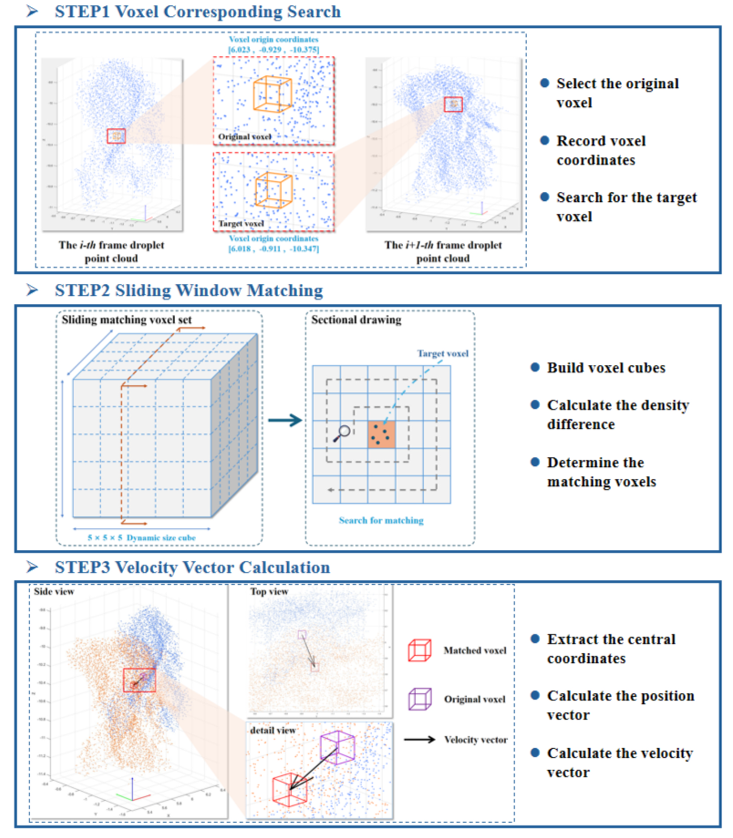
图3 局部光流估计方法
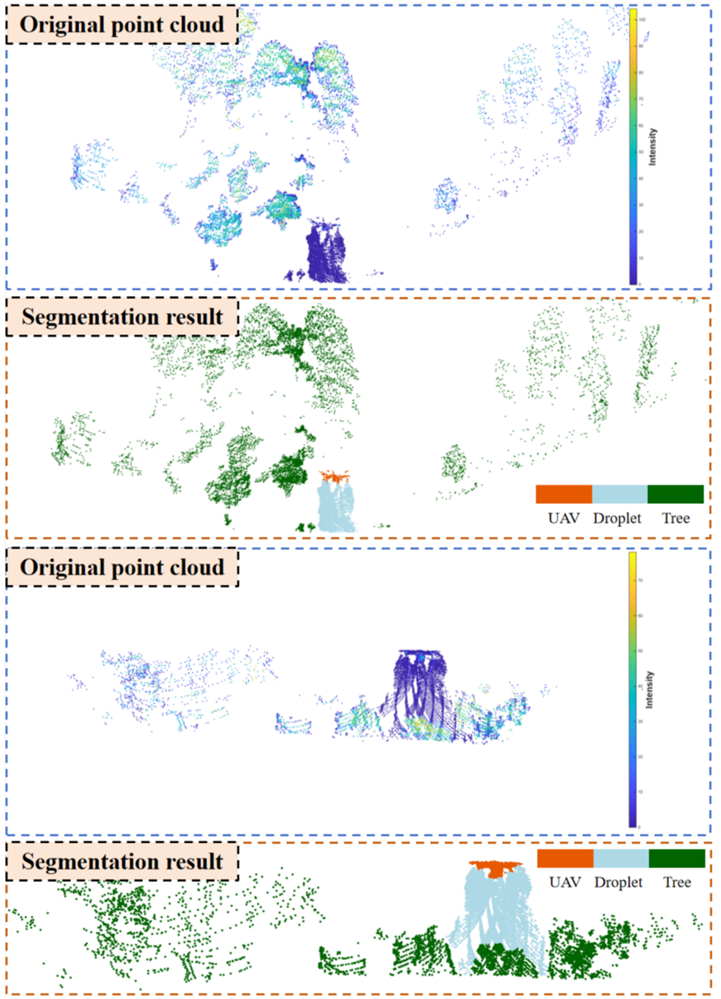
图4 雾滴语义分割结果
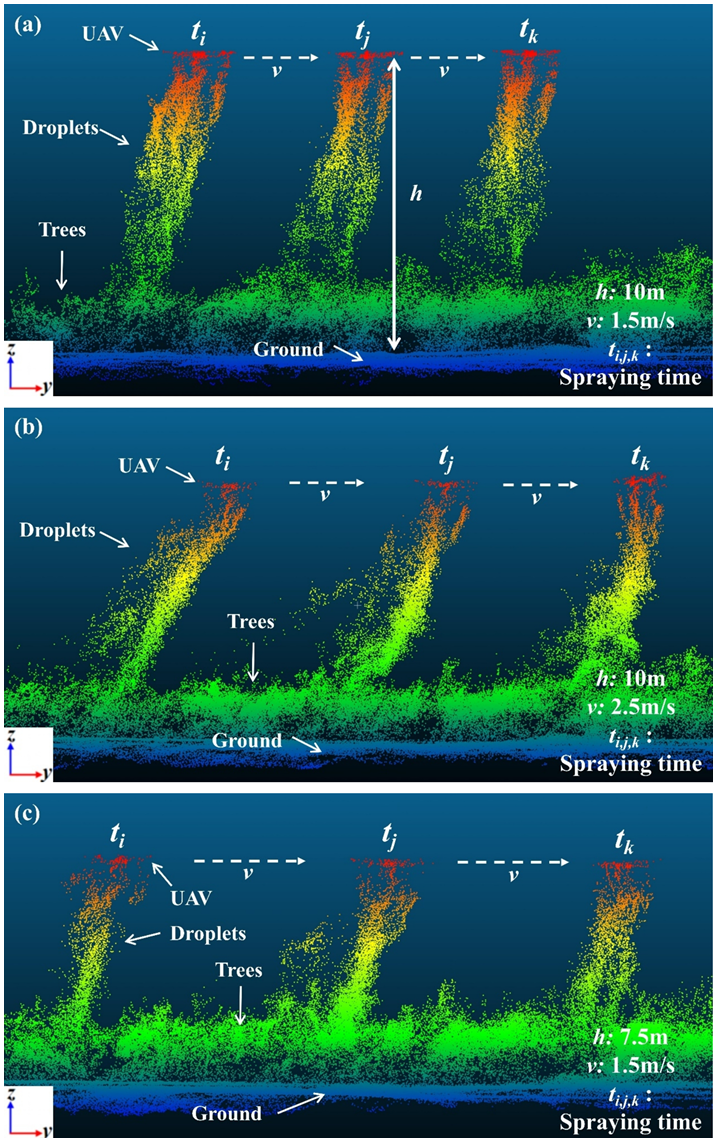
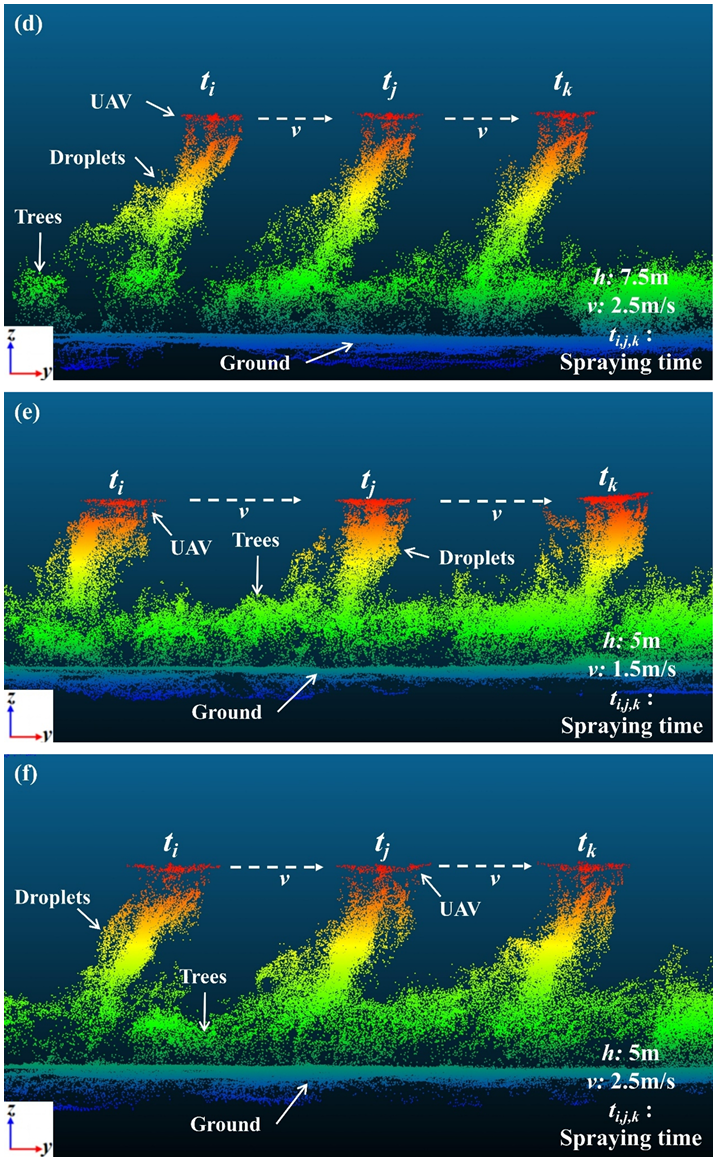
图5 雾滴重建结果
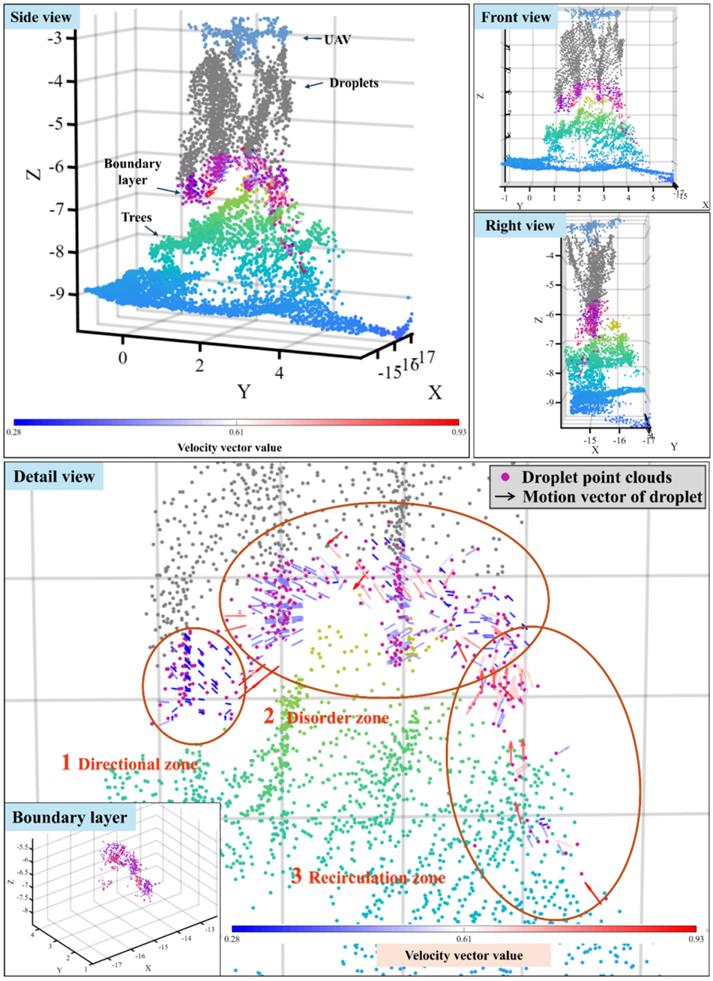
图6 雾滴运动规律分析
工程学院硕士研究生李斯培为论文第一作者。本研究工作在华南农业大学文晟教授与海南大学王娟教授的共同指导下完成。该研究得到了国家自然科学基金和广州市科技计划项目的资助。
论文实验系统与方法演示视频观看链接:https://www.bilibili.com/video/BV18RkNBuEQj/?spm_id_from=333.1387.homepage.video_card.click&vd_source=595e5ff74de79a3967b47e80fe85b709
相关论文链接:https://doi.org/10.1016/j.compag.2026.111849
https://www.sciencedirect.com/science/article/pii/S0168169926004448?dgcid=coauthor
文图/工程学院
